The design of a force feedback soft gripper for tomato harvesting
Accepted: 20 January 2021
HTML: 583
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Authors
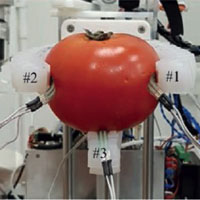
In smart farming, both artificial intelligence and robotic systems are applied in order to improve efficiency. In agriculture, for jobs such as seeding, monitoring, and harvesting, robots are widely used. When using robots to harvest fruit and vegetables, it is essential not to apply excessive force, as it may damage the harvest. In this paper, a soft robotic three-fingered gripper is presented. It was designed and analysed using the finite element method. Each finger is made of silicone rubber. The shape of the finger is designed so that it is capable of handling spherical shaped objects, such as tomatoes or oranges. When holding a tomato, the fingers apply the contact force. The fingers are actuated pneumatically and the force applied is also controlled by a micro controller. The pressure inside the air chamber of the finger is in the range of 0- 95 kPa. Force sensors are attached to the end of each finger to provide force feedback. Then, the holding force is adjusted and applied to the surface of the tomato. The gripper can successfully grasp tomatoes with a force less than the bio-yield of the tomatoes 2.57 N.




How to Cite

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
PAGEPress has chosen to apply the Creative Commons Attribution NonCommercial 4.0 International License (CC BY-NC 4.0) to all manuscripts to be published.