The design of a force feedback soft gripper for tomato harvesting
HTML: 708
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Authors
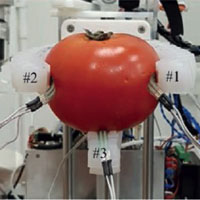
In smart farming, both artificial intelligence and robotic systems are applied in order to improve efficiency. In agriculture, for jobs such as seeding, monitoring, and harvesting, robots are widely used. When using robots to harvest fruit and vegetables, it is essential not to apply excessive force, as it may damage the harvest. In this paper, a soft robotic three-fingered gripper is presented. It was designed and analysed using the finite element method. Each finger is made of silicone rubber. The shape of the finger is designed so that it is capable of handling spherical shaped objects, such as tomatoes or oranges. When holding a tomato, the fingers apply the contact force. The fingers are actuated pneumatically and the force applied is also controlled by a micro controller. The pressure inside the air chamber of the finger is in the range of 0- 95 kPa. Force sensors are attached to the end of each finger to provide force feedback. Then, the holding force is adjusted and applied to the surface of the tomato. The gripper can successfully grasp tomatoes with a force less than the bio-yield of the tomatoes 2.57 N.




How to Cite

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
PAGEPress has chosen to apply the Creative Commons Attribution NonCommercial 4.0 International License (CC BY-NC 4.0) to all manuscripts to be published.
Similar Articles
- Adeshina Fadeyibi, Zinash D. Osunde, Evans C. Egwim, Peter A. Idah, Performance evaluation of cassava starch-zinc nanocomposite film for tomatoes packaging , Journal of Agricultural Engineering: Vol. 48 No. 3 (2017)
- Qingyu Chen, Rui Kang, Naishuo Wei, Yunlei Fan, Zeyu Wang, Yu Chen, Jun Chen, Design and experiment optimize of the vibration harvesting machine of Lycium barbarum L. , Journal of Agricultural Engineering: Vol. 55 No. 4 (2024)
- Luhua Han, Haorui Ma, Menghan Mo, Francis Kumi, Jianping Hu, Hanping Mao, Design and test of an efficient seedling pick-up device with a combination of air jet ejection and mechanical action , Journal of Agricultural Engineering: Vol. 55 No. 3 (2024)
- Davide Boscaro, Andrea Pezzuolo, Stefano Grigolato, Raffaele Cavalli, Francesco Marinello, Luigi Sartori, Preliminary analysis on mowing and harvesting grass along riverbanks for the supply of anaerobic digestion plants in north-eastern Italy , Journal of Agricultural Engineering: Vol. 46 No. 3 (2015)
- Emanuele Cerruto, Giuseppe Manetto, Giampaolo Schillaci, Vibration produced by hand-held olive electrical harvesters , Journal of Agricultural Engineering: Vol. 43 No. 2 (2012)
- Xiaoqiang Du, Tengfei Shen, Kaizhan Chen, Guofeng Zhang, Xiaohua Yao, Juanjuan Chen, Yongqing Cao, Simulation study and field experiments on the optimal canopy shaking action for harvesting Camellia oleifera fruits , Journal of Agricultural Engineering: Vol. 53 No. 3 (2022)
- H. Kursat Celik, Ibrahim Akinci, Nuri Caglayan, Allan E.W. Rennie, Structural strength analysis of a rotary drum mower during harvesting , Journal of Agricultural Engineering: Vol. 55 No. 1 (2024)
- Ayodeji Nathaniel Oyedeji, Umar Ali Umar, Laminu Shettima Kuburi, Albright Abu Edet, Yau Mukhtar, Development and performance evaluation of an oil palm harvesting robot for the elimination of ergonomic risks associated with oil palm harvesting , Journal of Agricultural Engineering: Vol. 53 No. 3 (2022)
- Artur Altunyan, Arshaluys Tarverdyan, Geometric and kinematic parameters of vibrating knife in the development of cutting machines , Journal of Agricultural Engineering: Vol. 52 No. 3 (2021)
- George Ashwehmbom Looh, Fangping Xie, Xiushan Wang, Augustine Ngiejungbwen Looh, Hamdaoui Hind, Grain kernel damage during threshing: a comprehensive review of theories and models , Journal of Agricultural Engineering: Vol. 56 No. 1 (2025)
You may also start an advanced similarity search for this article.







